
AGV驱动行走轮箱是AGV实现自动化搬运的关键部件,具有自动化程度高、灵活性强、安全性高等优点,但也存在初期投入成本高、对地面平整度要求高等缺点。在选择AGV驱动行走轮箱时需要根据实际需求和工作环境进行综合考虑。
AGV驱动行走轮箱的工作原理
AGV(自动导引车)驱动行走轮箱的工作原理主要涉及电磁或光学导引装置、控制系统以及驱动和转向装置。
导引原理:AGV根据AGV导向传感器所得到的位置信息,按AGV行走轮的路径所提供的目标值计算出AGV行车轮的实际控制命令值,即给出AGV行走轮的设定速度和转向角。导引控制是AGV轨迹跟踪的关键,有多种方法,如利用导向传感器的中心点作为参考点,追踪引导磁条上的虚拟点。
控制系统:包括地面(上位)控制系统及车载(下位)控制系统。地面控制系统主要负责任务分配、车辆调度、路径(线)管理、交通管理、自动充电等功能;车载控制系统在收到上位系统的指令后,负责AGV的导航计算、导引实现、车辆行走、装卸操作等功能。
驱动与转向:AGV的驱动轮通过驱动电机控制转动,从而带动整个AGV行走。转向则根据控制命令值,通过转向装置调整驱动轮的转角来实现。
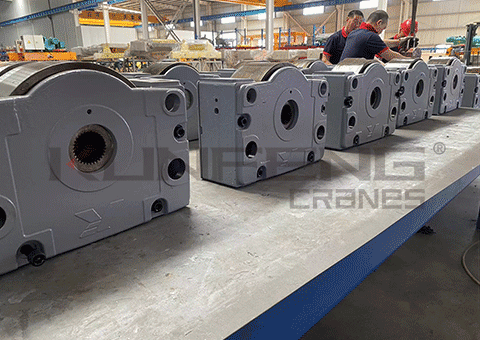
AGV驱动行走轮箱
AGV驱动行走轮箱的优点
智能化与自动化:AGV能够根据预设路径自主导航,实现无人化操作,提高生产效率。
灵活性:AGV可以灵活地在工厂内部或仓库等场所进行物料搬运,减少人力搬运成本。
安全性:AGV配备了安全保护装置,能够在遇到障碍物或人员时自动停车,避免事故发生。
可扩展性:AGV系统可以根据需要进行扩展,增加或减少AGV数量,以适应不同规模的生产需求。
AGV驱动行走轮箱的缺点
成本:AGV系统的初期投入成本较高,包括设备购买、安装、调试以及培训费用等。
环境适应性:AGV对地面平整度要求较高,地面不平整可能会影响其导航精度和行驶稳定性。
技术要求:AGV系统需要专业的技术支持和维护,对操作人员的技能要求也较高。
负载能力:不同型号的AGV负载能力不同,可能无法满足某些特定场合的大负载搬运需求。
以上分析仅基于一般性的AGV驱动行走轮箱的工作原理和优缺点,具体性能可能会因型号、设计以及应用场合的不同而有所差异。



